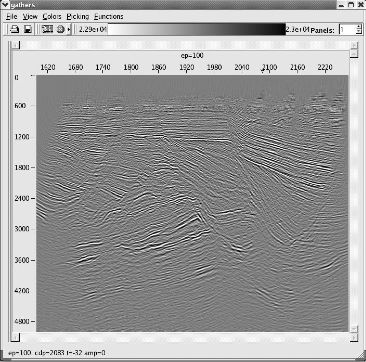
Autopicking PSTM
Figure 14 shows an image based on automatically picked velocities. In the image, the chase was the initial iteration of the imaging project.
- Introduction
- Seismic Modeling
- History
- Zero Offset Migration Algorithms
- Exploding Reflector Examples
- Prestack Migration
- Prestack Migration Examples
- Data Acquisition
- Migration Summary
- Isotropic Velocity Analysis
- Anisotropic Velocity Analysis
- Case Studies
- Salt Flood and Body Insert
- Amplitude Preservation
- Which One Should I Use?
- Land Data PSTM Versus PSDM Comparison
- Autopicking PSTM
- Tomography
- South Texas Fault Shadow
- Blessing Texas Case Study
- Data Mapping through AMO on the Blessing data
- Course Summary
