Zero Offset Hand Migration
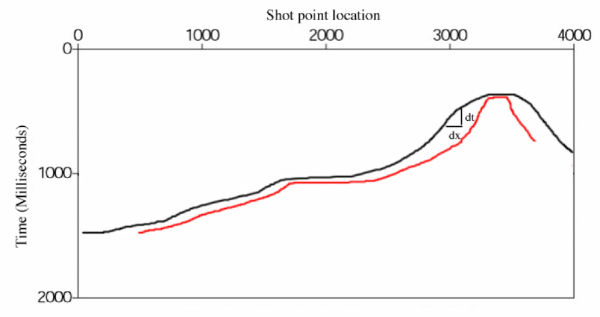
Given records like that in Figure
2, early explorers made a
stickmap that might have looked something like
the one displayed in Figure
3. The times defining the event in this figure would most likely have
been based on the identified arrival from the closest trace to the shot point. They would have liked to
have a trace in which the shot and receiver were coincident. But, because they were using dynamite,
this would have resulted in the destruction of the receiver, and so they settled for receivers that were
close to the shot. In Figure
2, the closest trace would have been the time pointed to by the arrow
with a shot-receiver separation (offset) of about 100 meters. This separation would have to suffice as
an approximation to a trace with coincident source and receiver. Such traces were called zero-offset
traces.
The black line graph in Figure
3 represents what is called a zero-offset or unmigrated time
section. What is
necessary for exploration and drilling is a depth map, or, when the velocity is constant, a migrated time map as
conceptualized by the red line graph. In this case, the red line was simply drawn in free-hand, but
represents the major features of what might be the true migration position of a reflected horizon.
Note in particular that after migration, the peak of the anticline has not changed position, but its
width has shrunk. It is also true that the positions of all dipping events have moved up-dip in every
case.
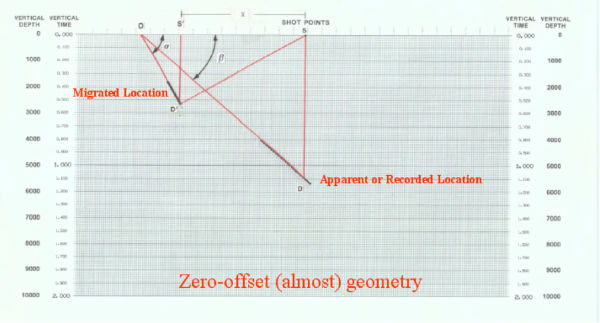
To produce the red-line section in Figure
3, we need to know how to convert unmigrated arrivals into migrated
arrivals. Figure
4 shows the relationship between zero-offset reflections and their correct migrated position. The
true reflector has a true dip angle of
α, while the apparent or recorded event is at dip angle
β.
In this figure, the data is assumed to have been recorded over a constant velocity medium. Note that the location of
the migrated event is placed relative to vertical time or depth, but remember that this vertical positioning is only
valid for constant velocity media. Since the velocity is constant, vertical depth is given formally by the
traditional relationship, where depth is equal to velocity times one-way time, that is,
d
=
vt=
2 or
t
= 2
d=v.
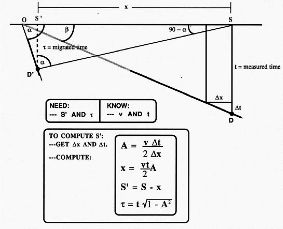
Migration in a two-dimensional, constant velocity medium requires only that we know the sound speed in the
medium, and can measure the ratio of the change in arrival time to the corresponding horizontal change. As
indicated in Figure
5, this is usually specified in seconds per trace divided by the trace spacing, but any
time interval and corresponding spatial interval will do. The formulas listed in the figure provide all
necessary calculations to determine the migrated position of any given event. Note again that in this
simple medium, vertical depth is easily obtained by multiplying the vertical time,
t, by the medium
sound speed,
v. Note also that events with any given apparent dip migrate up-dip. Consequently, we
can ignore the sign of any given value and simply place the migrated dip element at its appropriate
up-dip position. As we will see, extension of this formula to a vertically varying medium is quite
easy.
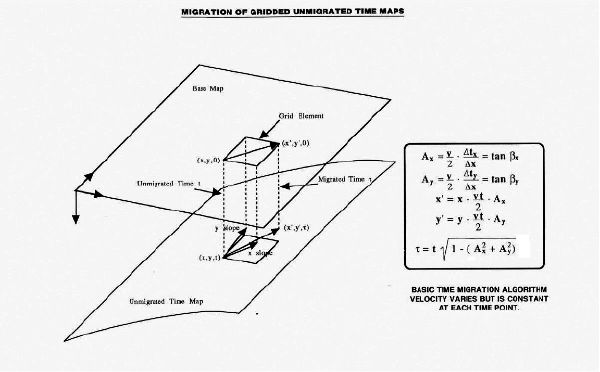
Figure
6 extends the migration formulas in Figure
5 to a three-dimensional constant-velocity medium. These
equations provide the necessary computational formulas to complete the migration process. Here, however, it is a
bit more difficult to actually do the migration by hand. At this point, the migrated position must be contoured to
produce a migrated map of the recorded event.
Beginning in the late 1940's and continuing until the early 1960's, all interpreters used this approach to produce
migrated prospect maps. The equations were employed in a two step manner, where calculations proceeded in the
line direction, and were then followed by similar calculations in the cross-line direction.
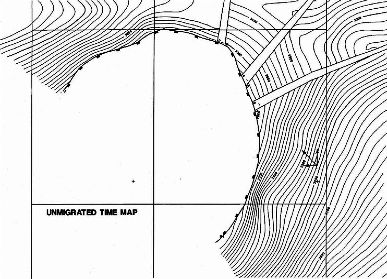
Figure
7 shows an example of an unmigrated or zero-offset map. In this case, faults and the large truncation
surrounding a large salt dome are clearly evident. This map is from an early interpretation done over a salt dome in
the Gulf of Mexico at South Pass Block 89.
The vectors graphed in Figure
8 are the result of using the equations in Figure
6. A computer was used to
generate and plot the vectors. Note the significant change in the shape of the salt structure and note
also that some of these vectors are over two miles in length. It is important to observe that any 2-D
migration of the red line will be inaccurate. Not only does its subsurface position migrate up-dip, but its
shape can change quite dramatically. This is a fundamental reason why 3D imaging is so superior to
2D.