Aperture
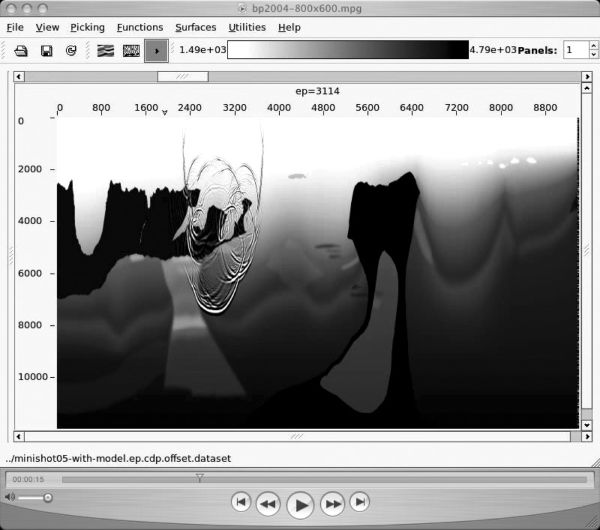
Figure 3 (courtesy of BP) provides an example of the kind of Earth model that you might see in the Gulf of Mexico. This model represents a typical salt imaging problem. Given that this model is a reasonably accurate representation of the subsurface, several facts are clear:
- every conceivable type of wave propagation will occur;
- since sea level represents a free-surface, every type of multiple will be evident;
- proper imaging will require that data acquisition be performed with a sufficiently wide aperture to capture a sufficient set of reflectors.
|
What modeling says is that producing an optimum image requires long offsets, long recording times, and small surface increments. What this means in three-dimensions is that we must use dense areal arrays as opposed to narrow-azimuth towed streamers. Another issue that is not fully appreciated is the importance of low frequencies. Full appreciation of this statement will become clear through the rest of the book.
Because it is from a Gulf of Mexico salt setting, many people conclude that the example represented by Figure 3 is of little value in a more worldly view of exploration. They say this kind of problem is simple to solve, and so should not be of much interest in the larger scheme of things. As we will see, this is far from the case. The salt-sediment contrast is on the order of 1.5 to 1, and a contrast this large is extremely difficult to handle for many of approximations used to produce imaging algorithms.
Figure 4 provides an example of the kind of complex geology we find on land. This perceived Oklahoma subsurface model from an over-thrust area in the southwestern part of the state faithfully represents a granitic overthrust in a very complex geologic setting. Once again, modeling tells us that to properly image subsurface structure, it is absolutely necessary to acquire long offsets and times. Thus, in both land and marine, satisfying mathematical assumptions means that acquisition arrays must be composed of point receivers, they must be areal in extent, and they must be densely sampled.

|
The rocks are hard, the near surface velocity is highly variable, and it is not unrealistic to assume that the true Earth model should really include anisotropy. Again, all waveforms are present in the simulation, and unraveling them requires that, to the extent possible, all waveforms be used in the imaging.
A big difference between imaging land and marine data is the lack of water cover for land data. When water is present, it is relatively easy to figure out what the near surface propagation parameters should be since it is not necessary to rely on the recorded data to determine the velocity of water. When water is not present, we must estimate the near surface velocity structure (compressional and shear) from the data itself, but this is very difficult to do because the number of traces that can be used to do this is highly restricted by the acquisition parameters. Sufficient offset is seldom available to do even simple semblance-based picking. What modern methods need is data that are fit for purpose; data must contain the information necessary to permit accurate estimation of the Earth model.
