Finite Differences
At first glance, finite difference modeling is by far the simplest method to grasp. All that is necessary is to replace the continuous partial derivatives by discrete approximations. The main difficulty arises in producing an accurate approximation to the various derivatives. There are two generally accepted approaches to finding approximations. The first is based purely on some form of fitting algorithm, frequently using polynomials, wherein a set of basis functions with known derivatives approximate the function whose derivative is required. Once the fit is obtained the derivative is defined in terms of the approximating functions.
Polynomial Differences
The easiest approach to finite difference approximation is to simply use a difference quotient in Equation 59 like we did when we derived the full two-way equation.
 | (59) |
This is what is called a first order forward difference approximation. Similarly, we have the backward difference in the form Equation 60.
 | (60) |
What may not be so clear is that these formulas are the result of approximating
u by a straight line between
x
+
Δx and
x and between
x
�
Δx and
x. One of the more popular methods for polynomial
approximation is based on the Lagrange polynomial in Equation
61 defined for a sequence of points
![[x0;x1;x2; xn]](book98x.png) .
.
 | (61) |
Any function f ( x ) defined that the point sequence can then be approximated by the formula of Equation 62.
 | (62) |
Approximations to the derivatives of
f
(
x
) can then be approximated through derivatives of the polynomial
P .
Since
P will always be of the form Equation
63, the approximate derivative will always be a weighted sum of the
values of
f
(
x
) at the sequence
![[x0;x1;x2; xn]](book101x.png) .
.
 | (63) |
More accurate approximations can be obtained through the use of other polynomial basis including the Hermite and Chebychev polynomials.
Taylor Series Differences
The Taylor series for u ( x � Δx ) in terms of u ( x ) is given in Equation 64.
 | (64) |
If we rearrange this series in the form Equation 65, we immediately recognize that the forward and backward differences are are accurate to Δx. Mathematically, we say that the forward and backward difference are O ( Δx ).
 | (65) |
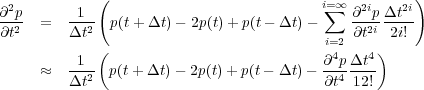
The Taylor series in Equation 64 can easily form the basis for other more accurate formulas. The most obvious formula arises from the sum of the Taylor series expansions for u ( x + Δx ) � u ( x ) and u ( x ) � u ( x � Δx ). This immediately yields the central difference formula in Equation 66 which is O ( Δx 2 ).
 | (66) |
Since we generally think of Δx as being much less than 1 in magnitude, this central difference formula is clearly an improvement over a first-order forward or backward difference.
Second Order Differences
When we summed the formulas for u ( x + Δx ) � u ( x ) and u ( x ) � u ( x � Δx ). we obtained a series that contained odd order derivatives. Accordingly, if we subtract the two formulas, we obtain a series that contains only even order derivatives. This immediately produces O ( Δx 2 ) formula for the second derivative with respect to x.
 | (67) |
High Order Differences
Extension of the second order central difference formula to higher orders is tedious, but straight forward. For any given k (real or integer), there is Equation 68.

Thus, if we want a fourth order scheme, we take the two terms in Equation 69 and Equation 70, solve the second term for the fourth order partial derivative and substitute the result into the first term to obtain Equation 71.
 | (69) |
 | (70) |
 | (71) |
Higher order central difference approximations are obtained by simply adding additional terms to the mix. For example, a 10th order accurate term is obtained by back-substitution in the five equations when k = 1 ; 2 ; 3 ; 4 ; 5. The result is a scheme of the form Equation 72, where the terms are given in Equation 1.
 | (72) |
|
|
|
|
Table
1 Spatial Difference Terms
| |
|
|k| |
w |
|
|
|
|
0 |
-5.8544444444 |
|
1 |
3.3333333333 |
|
2 |
-0.4761904762 |
|
3 |
0.0793650794 |
|
4 |
-0.0099206349 |
|
5 |
0.0006349206 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Finite Differences for the Pressure Formulation
We can now formulate a finite difference propagation equation of just about any order we would like. However, it is of interest to reconsider the graphic in Figure 16(b). This figure, based on a simple second-order space-time difference equation shows that to compute any given fixed time stamp, the maximum extent of the stencil is exactly equal to three in each spatial direction and two in time. Thus, to make this process computationally efficient, it is prudent to keep the three t � Δt, t and t + Δt volumes in memory at all times.
It is clear from Equation 72 that higher order differences will produce stencils with maximum extent determined by the maximum value of k. Thus, if we chose to use a 10th order scheme for each both space and time, our propagator will be 11 grid nodes wide in each spatial direction and 10 volumes in memory for each of the time stamps t � kΔt for k = � 5 ; 5. Even with current computational capabilities, holding this many volumes in memory is somewhat impractical. It is natural to try and find a procedure that avoids this memory explosion problem.
Graphical Descriptions
Figure 16(a) demonstrates two-dimensional propagation and Figure 16(b) demonstrates three-dimensional propagation in what is generally called acoustic Earth models. Note that the central difference stencil extends from time t � Δt to time t to compute an output point at t + Δt.
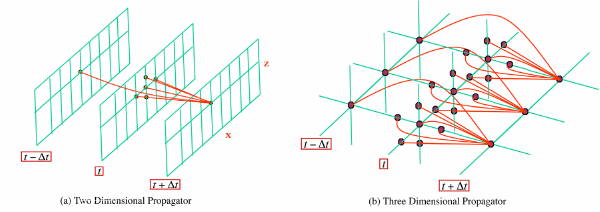
Note that in both cases, the stencil surrounds the ultimate output point to compute the new value. In the 2-D case, the stencil nodes are planar, while the 3-D nodes are volumetric. Thus, the wavefields are allowed to propagate upward, downward, and laterally in all directions as the propagation continues. It also means that we must compute all nodes at step t before we can compute any of the nodes at t + Δt. The examples in the last three figures produce what is called two-way propagation. All waveform styles (for example, refractions, free-surface, and peg-leg multiples) are possible in this setting since these propagators synthesize full waveform data.
Lax-Wendroff Method
Probably the best known "trick", initially published by Peter Lax and Burton Wendroff (see
also M.A. Dablain), used the wave equation to find a fourth order accurate difference for
 that
does not increase the overall memory requirement. To understand this trick, consider the case in two
dimensions when the velocity is constant and
ρ
= 1. From earlier efforts, we have Equation
73.
that
does not increase the overall memory requirement. To understand this trick, consider the case in two
dimensions when the velocity is constant and
ρ
= 1. From earlier efforts, we have Equation
73.
We also know the second order derivative,
 , in Equation
74.
, in Equation
74.
 | (74) |
Thus, the fourth order derivative in time is given by Equation 75.
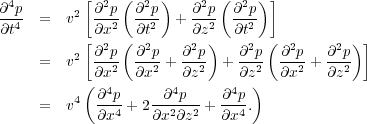
It should be noted that the assumptions of constant density and velocity are not necessary because the Lax-Wendroff scheme generalizes our scheme for finding higher order central difference terms through the recursive formula in Equation 76.
 | (76) |
What we did in the case above was to recognize that higher order time derivatives can be computed from higher order spatial derivatives by applying the spatial side of the original wave equation.
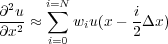
If we now replace the spatial derivatives using formulas like that in Equation 72, we arrive at a fourth order formula for the second partial derivative in time. After calculating all the various weights, replacing partial derivatives with central differences, and solving for p i;j;n +1 = p ( i � x;j � z;n � t + � t ), we arrive at a discrete central difference formula of general form shown in Equation 77.

For clarity, Δx 2 and Δy 2 have been suppressed, and s i 0 ;j 0 ;n represents a source at the location specified by i 0 and j 0.
Formulas of this kind are generally called difference equations and provide what is usually called an explicit forward marching algorithm for data synthesis. Schemes of this kind are also called quadrature methods because what they are actually doing is integrating the wave equation to synthesize a response to a given stimulus.
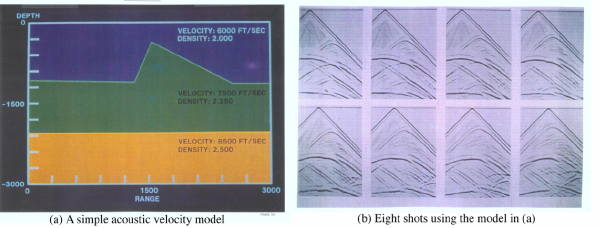
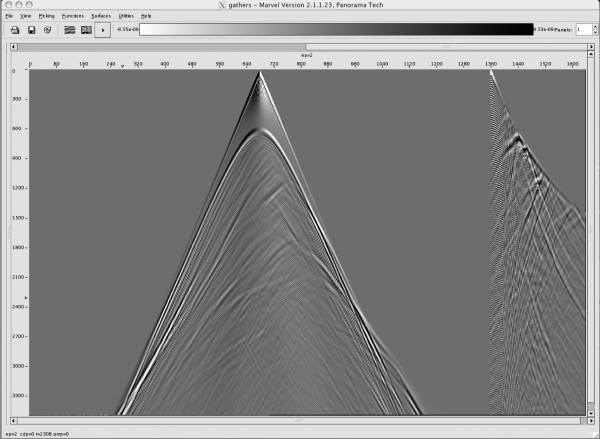
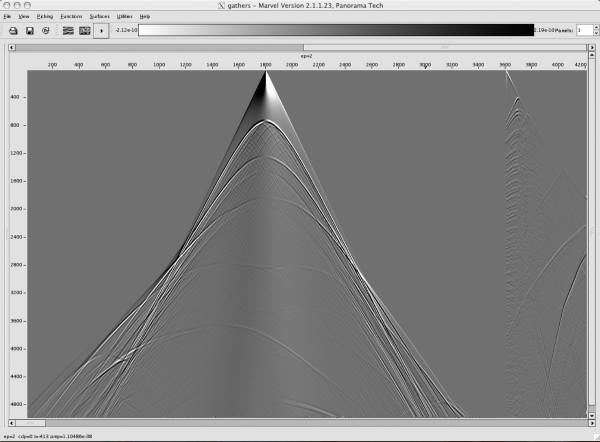
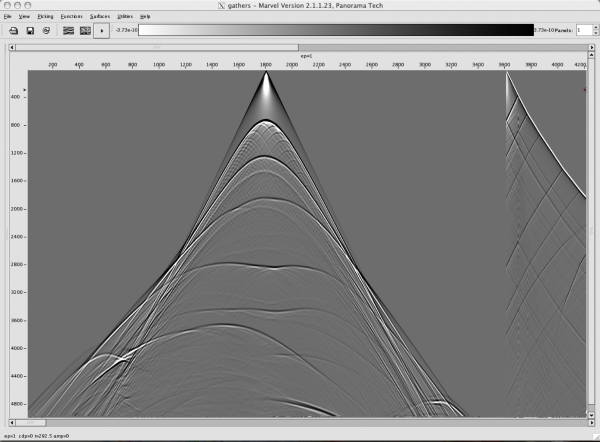
Figure 17 shows a simple pyramid model and data. The finite difference data over this model was synthesized on VAX 11-780 computers in late 1981 and early 1982. At that time, the calculations necessary to compute each shot required on the order of 48 hours. Today, most laptops can compute the entire set of 24 shots in minutes.
Elastic Finite Differences
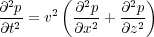
We now turn our attention to discrete simulation of vector elastic data. We can do this using either Equation 35 or Equation 36. Choosing the former leads to a method that is essentially the same the pure explicit finite difference algorithm discussed in the previous. To gain a slightly different perspective, we base our formulation on Equation 36 and again we limit ourselves to the 2D case. In somewhat more familiar notation, Equation 36 becomes Equation 78.
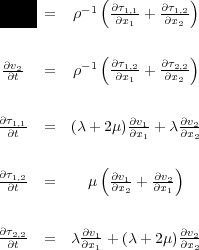 | (78) |
We note that v 1 is the horizontal and v 2 is the vertical velocity of a particle at any given position in space.
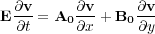
In this case Equation 42 (the evolution equation) becomes Equation 79, where v, A and B are given by Equation 80 and Equation 81, respectively.
 | (79) |
![v = [v ;v ; ; ; ]T ; H = A @v-+ B-@v;
1 2 1:1 1;2 2;2 @x1 @x2](book121x.png) | (80) |
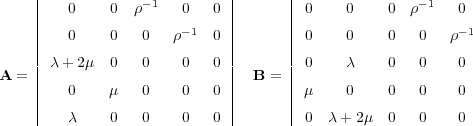 | (81) |
Recall that the solution of this equation has the form of Equation 82.
 | (82) |
Equation 82 is immediately recognizable as a convolution in time. Thus, the progression from initial state to final state is really just a recursive convolution at each time stamp t. The well known series expansion for exp ( x ) provides an immediate approach to providing a discrete evolution equation for the solution vector v ( t ). The resulting scheme is equivalent to the Lax-Wendroff methodology and so will not be discussed further. If you are interested, you are encouraged to work out the mathematical details.
Staggered Grids
What we would like to develop is a finite difference solution to the system in Equation 79. We could, of course, use the higher order difference formulas developed through the use of the system in Equation 70. Several authors (Jean Virieux and A. Lavender) have suggested that somewhat higher accuracy might be achieved through the use of smaller time and space increments. Thus, their idea was to simply rewrite Equation 70 in the form of Equation 83 and Equation 84.
 | (83) |
 | (84) |
This equation, of course, results in a difference formula of the form in Equation 85.
 | (85) |
Note that in Equation 85, the actual derivative is still estimated at a fixed grid point, but the accuracy is based on half the sampling increment.
At first glance it might seem that discrete solution of the system in Equation
78 using formulas based on half
derivatives would require significant more storage than using formulas defined at the normal sampling increments.
It turns out that this is not the case. We first simplify the notation by defining
![[v;w; ; ; ]](book127x.png) =
=
![[v1;v2; 1;2; 1;2; 2;2]](book128x.png) so that we can then write
v
i;j
k
=
v
1
(
i
�
x;j
�
y;k
�
t
) for any sampling rate, and similarly for
w,
σ,
ξ, and
ζ.
so that we can then write
v
i;j
k
=
v
1
(
i
�
x;j
�
y;k
�
t
) for any sampling rate, and similarly for
w,
σ,
ξ, and
ζ.
A fourth order scheme in space and second order scheme in time to solve Equation 78 can then be expressed as Equation 86.
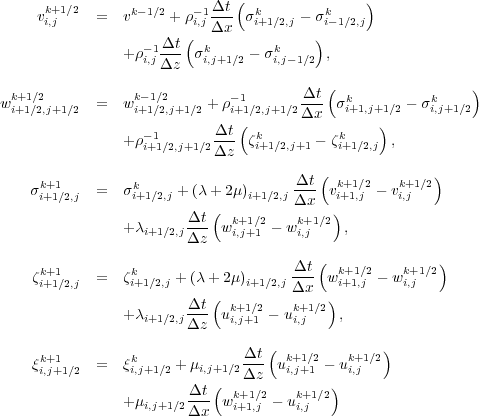
The major difference between this and the usual sampling increment scheme is that the different components of the velocity field are not known at the same node. The actual size of each grid is identical to that of a more traditional equally spaced approach so staggering the grid does not change the overall size of the problem
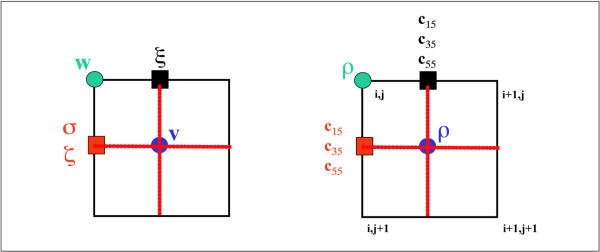
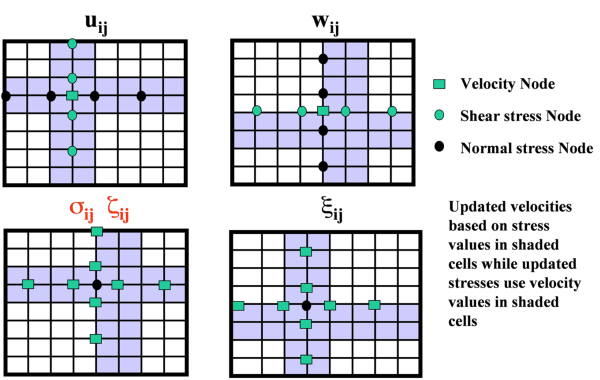
Figure 18 and Figure 19 graphically demonstrate staggered grid propagation. The first of these figures show how the model parameters intermingle with data values at each grid node. The second figure show how each stencil for each of the propagating wavefields is applied. Note that going from one time stamp to the next requires you to cycle through an application of four different stencils.
It is clear that synthesizing data over elastic models requires significantly more computational resources than when the model is acoustic. Simple isotropic elastic models are described by six volumes, while VTI and full elastic models require seven and eight volumes, respectively. In addition to this increase in storage, the computational load increases by at least one order of magnitude.
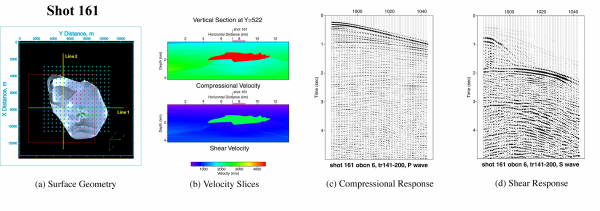
Figure 20 through Figure 24 provide clear examples of simulations over both isotropic elastic and VTI models. Figure 20 illustrates an isotropic elastic version of the SEG/EAGE salt model along with representative in line compressional and shear responses. Figure 21 and Figure 22 show similar images over the Marmousi2 isotropic elastic model. Figure 23 and Figure 24 provide graphics of the full VTI model and VTI shot responses.









Predictor-Corrector Schemes
Equation 82 can be approximated by a first-order difference to produce the Euler or forward predictor scheme in Equation 87.
 | (87) |
A second order scheme can be obtained by averaging the predicted value with the current value as shown in Equation 88.
 | (88) |
In this case, the x 1, x 2, and x 3 differentials are replaced with suitable central differences, and Equation 88 is used as a predictor-corrector scheme of second order.
Splitting
It is possible to rewrite Equation 79 in the form Equation 89, where A 0, B 0, and E 0 are given by Equation 90 and Equation 91, respectively.
 | (89) |
 | (90) |
 | (91) |
We note that if we let V = E 0 v, F = A 0 v, and K = B 0 v, then Equation 89 takes the form of Equation 92.
 | (92) |
Equations of the form in Equation 92 are called divergence free. Equations of this form are easily split into two much simpler equations which are then solved by splitting methods. The simple conceptual idea is to solve the equation in one direction and then the other, followed by reversing the solution order for the next time stamp. Suppose we let L x represent one finite difference update using only the x variables and L y represent one finite difference update using only the y variables. The general process for updating then uses the formula in Equation 93.
 | (93) |
Thus, all we have to do is specify one or the other of the solution schemes L x, or L y and completely by symmetry we will have the other. A fourth order in space, second order in time predictor-corrector scheme for L x takes the form of Equation 94.

Propagation Stability
Each of the various finite difference methods you might construct contains a ratio of the form
 , where
ν is one of the spatial increments
Δx,
Δy or
Δz. It might come as
somewhat of a surprise that if this ratio is too large, the propagation scheme it helps define will not be stable. An
unstable scheme will eventually produce excessively large numbers and exceed the numerical accuracy of the
machine it is running on.
, where
ν is one of the spatial increments
Δx,
Δy or
Δz. It might come as
somewhat of a surprise that if this ratio is too large, the propagation scheme it helps define will not be stable. An
unstable scheme will eventually produce excessively large numbers and exceed the numerical accuracy of the
machine it is running on.
Derivation of a formula that can provide an accurate bound for these ratios requires that we first relate frequency to wavenumber. To do this in a simple manner, we begin with the 1D version of the Lax-Wendroff discrete pressure equation (Equation 17), as shown in Equation 95, where v is velocity.
 | (95) |
To make our life just a bit easier, we assume a solution of the form
exp
![[ikxx ω t]](book140x.png) and ignore the
higher terms to obtain the dispersion relation in Equation
96 and Equation
97.
and ignore the
higher terms to obtain the dispersion relation in Equation
96 and Equation
97.
![1 4 ! t
--2 [2cos(! t) 2] =---2 sin2 ---- = v2k2x
t t 2](book141x.png) | (96) |
 | (97) |
Although the true dispersion relation for the 1D equation has
c
=
 , Equation
97 says that the discrete
velocity is greater than the true velocity.
, Equation
97 says that the discrete
velocity is greater than the true velocity.
 | (98) |
Thus, to avoid explosive growth, we must have the relation in Equation 99.
 | (99) |
A similar analysis shows that to achieve stable isotropic elastic ( P � SV ) waves, we must have the relation Equation 100.
 | (100) |
The important aspect of this analysis is that we cannot choose our time step size arbitrarily. We must use the appropriate version of Equation 99 or Equation 100 to assure that the calculations we perform and consequently the waveform we produce will not grow exponentially.
- Introduction
- Seismic Modeling
- Primary Concerns
- Three Earth Models
- Seismic Acquisition: The Basic Idea
- Why Model?
- Waves and Wavefields
- The Scalar Wave Equations
- Stress-Strain Equations
- Algorithms
- Variational Formulation and Finite Elements
- Finite Differences
- Model Boundaries
- Fourier Based Methods
- A Word About Sources
- Huygens Principle and Integral Methods
- Raytracing
- Raytrace Modeling
- Zero Offset Modeling
- History
- Zero Offset Migration Algorithms
- Exploding Reflector Examples
- Prestack Migration
- Prestack Migration Examples
- Data Acquisition
- Migration Summary
- Isotropic Velocity Analysis
- Anisotropic Velocity Analysis
- Case Studies
- Course Summary
